Optimal Control by Pontryagin principle
Problem statement
State equation: \(\dot x = x \exp \left( \alpha \left(1-\frac{x}{K}\right) \left( \frac{x-C}{K} \right) \right) - x h\)
Utility function \(\pi(h, x, t) = \frac{h^{1+\gamma}}{1+\gamma}\)
Boundary constraints: \(x(0) = X_0 \qquad x(T) = X_T\)
See problem statement and analytic BVP formulation details in this post. Additionally we scale the variables appropriately. Then we can begin with some basic parameter exploration in the original model formulation. We solve by collocation:
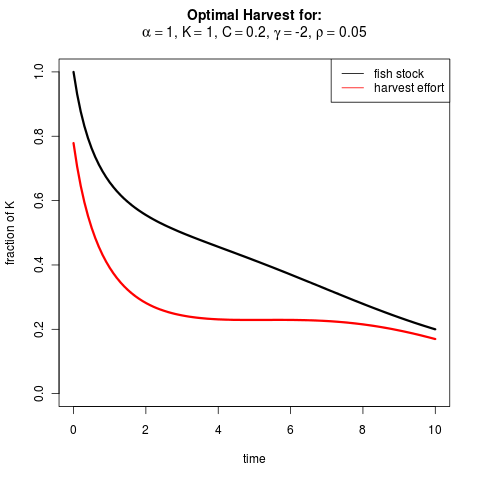
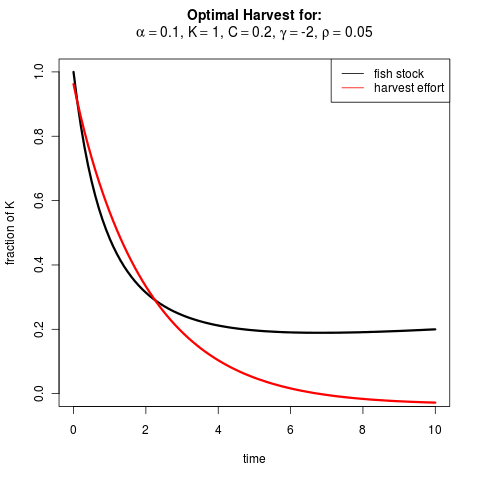
Decreasing the ecological dynamics timescale (growth rate \(\alpha\) ) leads to less fishing eventually but also slower decrease in fishing rate:
Increased discounting means fish faster now and….
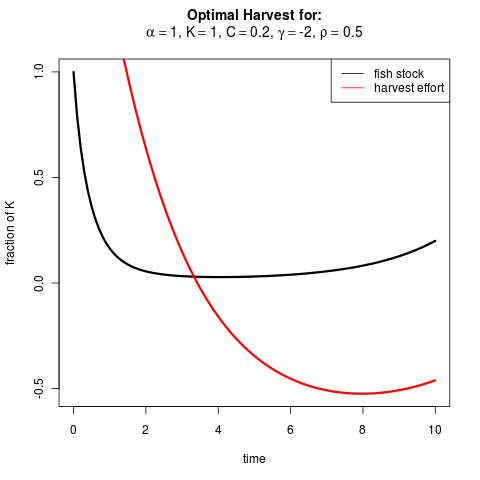
…whoops, put fish back in the sea later (negative harvest).
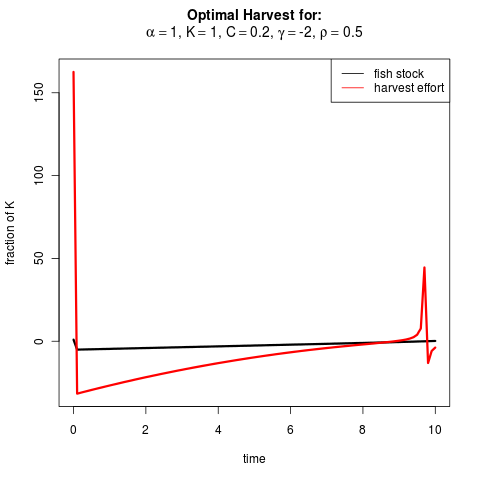
Control on harvest directly rather than harvest effort gives ill-behaved solution:
Code defining the system.
Code for running the examples.
Inequalities
This solution has only equality based constraints. A trivial inequality to consider is the final stock size is properly a lower bound, but clearly the optimal solution will attain this bound. The next inequality constraint to consider is $ h > 0 $, avoiding results such as above. I believe this constraint must enter through the state equation, as it is a dynamic constraint?
We could solve the Hamilton-Jacobi-Bellman equation instead; may be a good building block for the stochastic case. Perhaps warm up for this using the discrete case…
Discrete-time state equation
a discrete Ricker-style model: \[ x_{t+1} = f(x,h) = x \exp \left( \alpha \left(1-\frac{x}{K}\right) \left( \frac{x-C}{K} \right) \right) - h \beta \] or a more Beverton-Holt style model: \[ x_{t+1} = r\frac{x^{\alpha}}{1+\frac{x^{\alpha}}{K}} - x E_h \beta \]
Sounds like a dynamic programming approach is called for.
Stochastic Optimal Control
Looks like this needs a dynamic programming approach.
Higher-dimensional state equations
Steps check list
Simple boundary-value problem solution by collocation. Example.
Chebychev polynomial collocation
Jim’s additional examples. Matlab examples.
Harvest vs fishing effort as control variable.
Solution under inequality bounds
Discrete-time state equations
Stochastic Control
Horan 2 dimensional system