Forage fish presentation
Some simulations exploring top-down & bottom up control concepts in simple models.
\[ \frac{dN}{dt} = r N\left( 1 - \frac{N}{K} \right) - \alpha N P \] \[ \frac{dP}{dt} = \beta \alpha N P - \mu P \] Note that at equilibrium, N depends only on predator dynamics, P on K and r. \[\hat N = \frac{\mu}{\alpha\beta} \] \[ \hat P = \frac{r}{\alpha}\left( 1 - \frac{N}{K} \right) \]
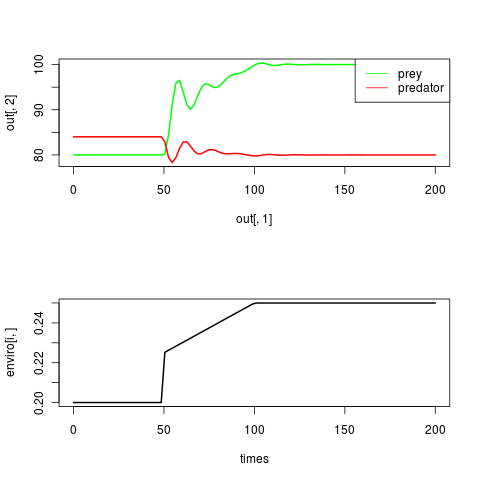
Saturating predator response:
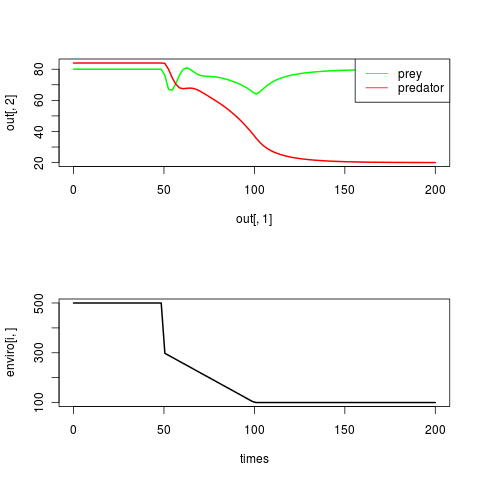
\[ \frac{dN}{dt} = r N\left( 1 - \frac{N}{K} \right) - \alpha N P \] \[ \frac{dP}{dt} = \beta \alpha \frac{N}{H+N} P - \mu P \]
Equilibrium:
\[\frac{\mu H}{ \alpha\beta-\mu} \] \[\frac{r}{\alpha} \left(1- \frac{\hat N}{K}\right) \]
see code for saturating example.
Wainwright Lab Meeting presentation
- Presented rfishbase, rtreebase demos.